
Last year, Aimsun concluded a three-year collaboration with the C-Roads Spain programme, undertaking simulation of Vehicle to Everything (V2X) services on test routes in Spain. V2X is an umbrella term for the communication between a vehicle and anything around it, from mobile devices to roadside units, infrastructure, or other vehicles. C-Roads Spain is part of a larger initiative taking place across 16 European nations, investigating the benefits of a massive roll-out of V2X services in terms of road safety, transportation efficiency and energy savings.
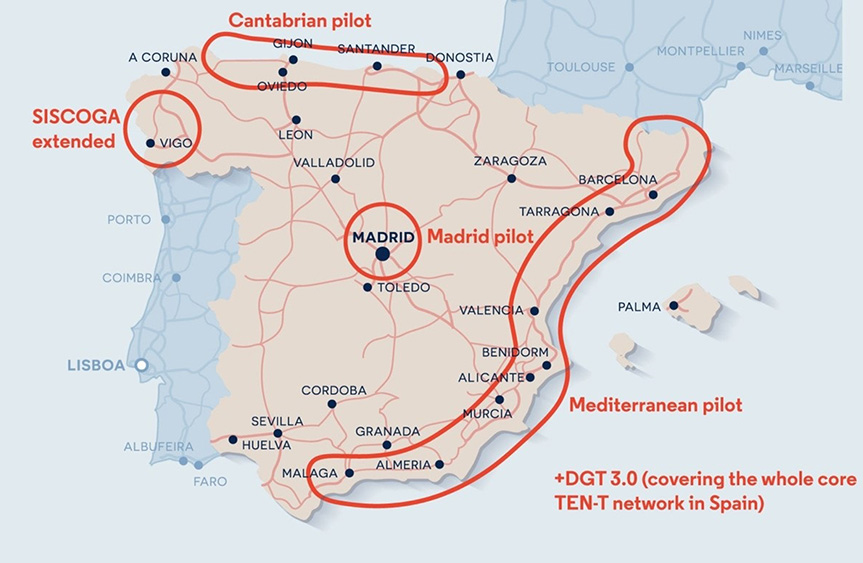
The pilots in Spain each have a unique set of technologies and C-ITS (cooperative intelligent transportation systems) services and involve different partners. This heterogeneity allows the team to assess the impact of connected mobility in as many representative scenarios as possible and to verify interoperability at national and European level.
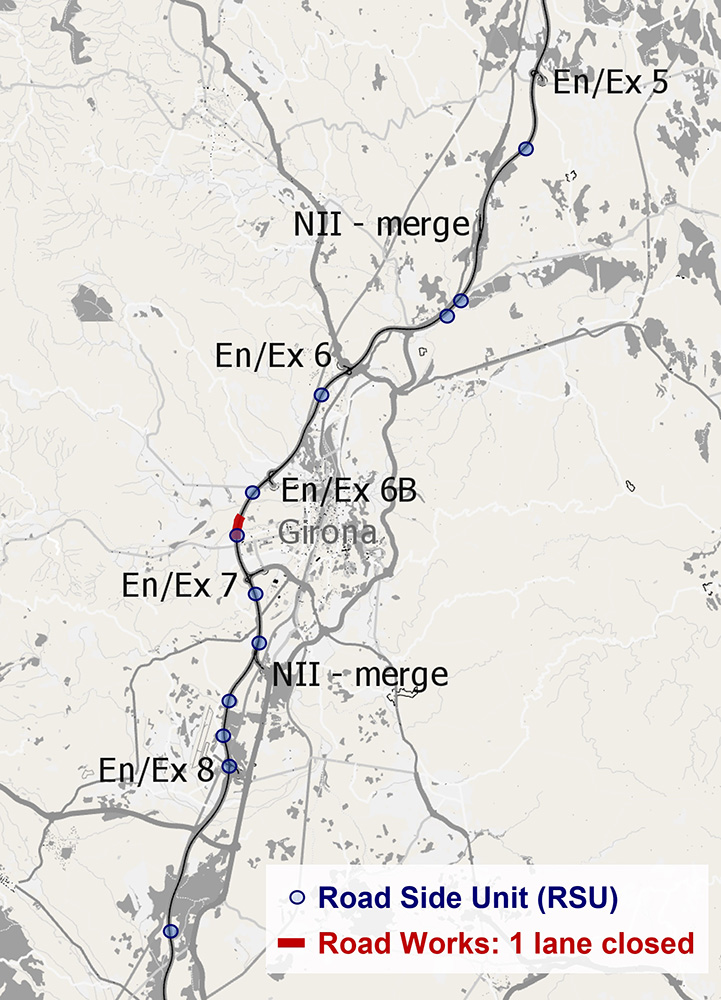
Aimsun has been involved in a number of these, including the Mediterranean pilot which was deployed on selected road sections along the AP-7 highway. The AP-7 runs along the coast, down through Catalonia, Valencia, Murcia, and Andalusia, but the study most closely focuses on a 20km stretch running by the city of Girona in northern Catalonia. The model, comprising 532 sections validated using 50 detector (toll) locations, contained 289 origin/destination pairs, and was further calibrated using Inrix floating car data to allow daily traffic profiles to be established for working days, Fridays, Saturdays and Sundays.

While the overall project investigates a wide range of C-ITS applications, three of these were chosen for examination on the AP-7 pilot, and each was assessed in terms of different KPI impact indicators. We illustrate two of these scenarios below.
The first was ‘Road Works Warning - Lane Closure’, in which the slow lane of the road was physically closed. C-ITS-equipped vehicles are equipped with on-board units (OBUs) that allow them to receive data from roadside units (RSUs), allowing the driver to become aware of this closure at a greater distance than non-equipped vehicles (up to 1km versus 200m from the nearest RSU), which allowed them more time to perform lane changes.
The impact of this technology was assessed over three scales: the 200m of road immediately preceding the closure; the preceding 1km; and the preceding 4km. The operational hypothesis here is that if vehicles attempt to change lanes earlier, there is less need for them to take small gaps. This in turn will likely cause less hard braking even in the second lane and across the carriageway, leading to less frequent and less harsh shockwaves.
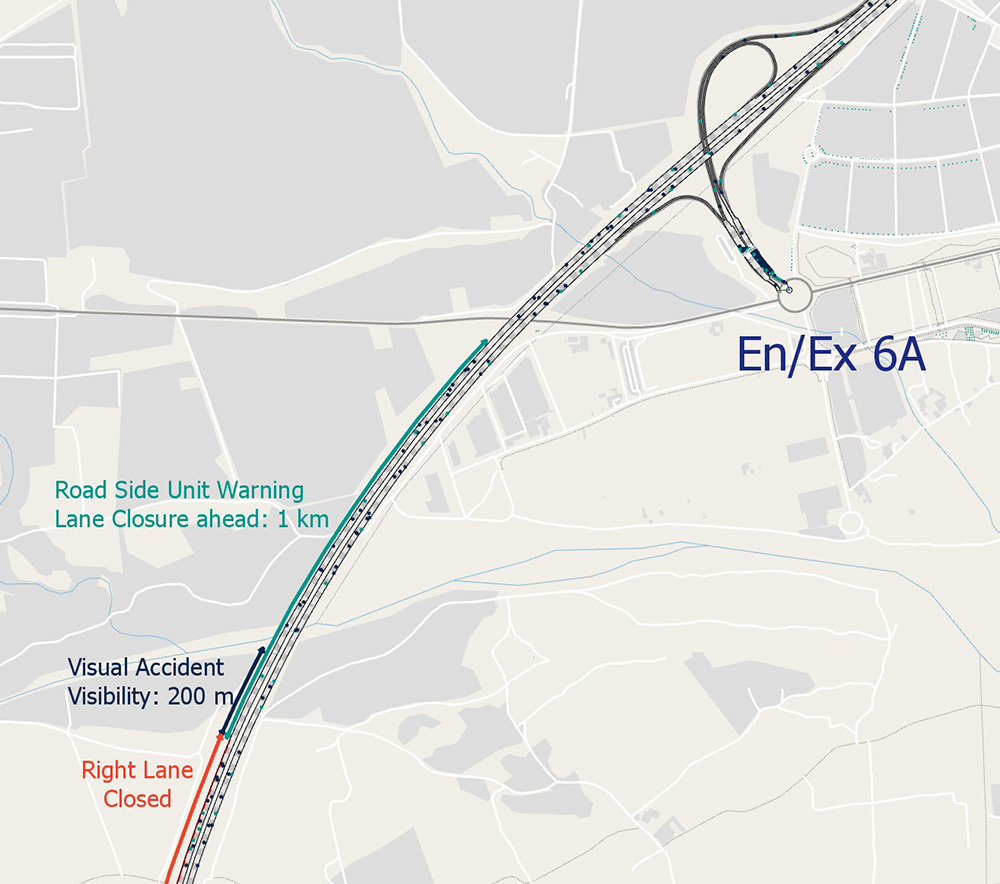
Indeed, the number of lane changes per vehicle was found to decrease by up to 3% at 4km, 15% at 1km and 80% at 200m from the closure, for the highest penetration rate.
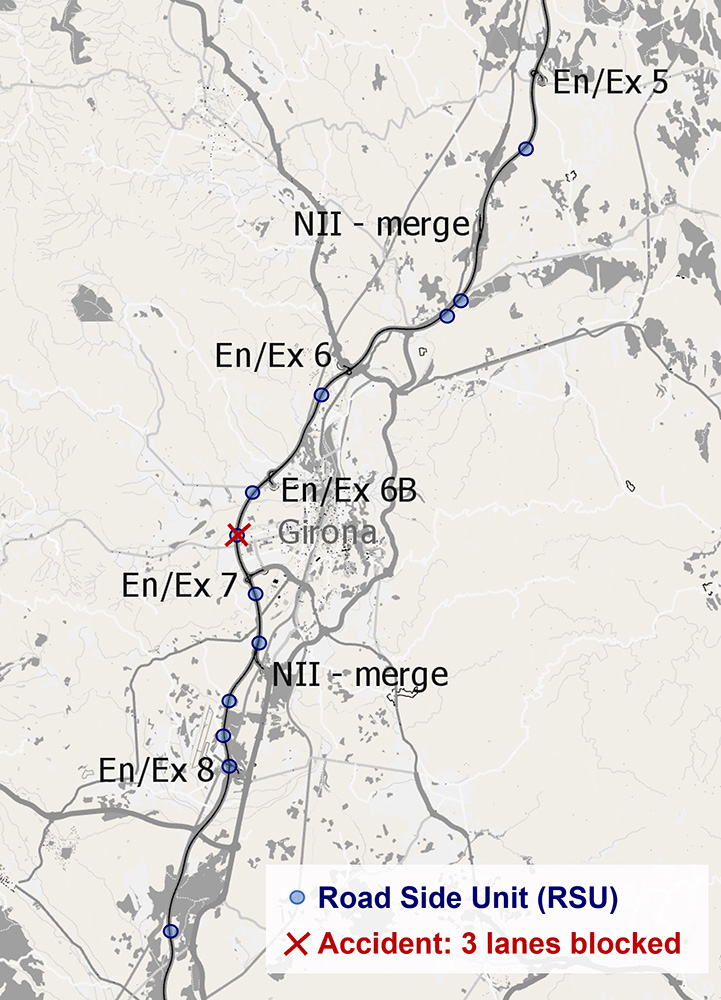
The second scenario was the ‘Hazardous Locations Notification (HLN)’ system that warns drivers at an early stage when approaching a hazardous location. In this use case, it was an accident zone, and the system prepared the driver for the impending event so they could start to decelerate or change lane.
The use case here simulated an accident by initially blocking three out of four lanes of the highway between Entrance/Exit 6B and Entrance/Exit 7 at 18:15. From 18:25 a temporary reduction in the speed limit to 80 kph was added over the section affected by the incident, plus an additional 200m upstream. The incident was removed at 18:45, with traffic progressively returning to normal.
As with the previous use case, unequipped vehicles would react to the closure from 200m away, whereas those equipped with OBUs would start to react 1km away. Also, a variability of 30-120% in distance zone factor was implemented to reflect how different drivers would respond to the information.
The distance zone factor is used to modify the distance zones used in the Lane Changing Model to determine where vehicles make their lane choice for a forthcoming turn.
The impact of this functionality was found to linearly decrease the prevalence of stop-go driving in the upstream traffic. The higher the OBU penetration rate, the more lane changes shift upstream; this leads to fewer stops since the vehicles have a wider window of time in which to make the manoeuvre.
Although the underlying theory of the benefits brought about by C-ITS may seem obvious (traffic smoothing brought about by early decision making), simulation allows us to investigate many of the more subtle features that may occur in practice, such as the effect of the density of the RSUs (the more frequent, the more granular the information that can be transmitted) - and how these need to be placed to ensure maximal effect at complex junctions and highway merges, allowing us to undertake critical evaluations that will directly affect C-ITS business cases.
The findings we have shown above are only a tiny fraction of those from the C-Roads project, which based its findings on a huge range of key performance indicators. We hope to bring you more insight into our work via a series of upcoming webinars that will be advertised on our webpage as well as LinkedIn.
C-Roads Spain
Cooperative ITS (C-ITS) encompasses a group of technologies and applications that allow efficient data exchange through wireless communication technologies between components and actors of the transport system, either Vehicle to Vehicle (V2V) or Vehicle to Infrastructure (V2I).
C-ITS is an evolutionary process that will start with the least complex – Day 1 - use cases, which encompass messages about notification of locations or danger situations as well as signalling applications. In a second stage, Day 1.5 services will also be deployed.
Day 1 cases include slow or stationary vehicles and traffic ahead warning, which can improve traffic fluidity by encouraging other vehicles to take an alternative route; road works warning (allowing the road operator to alert with drivers through I2V communication about restrictions and instructions); weather conditions; emergency braking light; or probe vehicle data (PVD). Also known as floating car data, PVD is data generated by vehicles and contains vehicle positional information, time stamp and motion. Driver actions such as steering, braking, flat tyre, windscreen wiper status, air bag status, and weather and road surface conditions can also be transmitted. The data is used to manage traffic flows, maintain roads and to alert users in hot spots, where the danger of accidents accumulates.
Meanwhile typical Day 1.5 cases include park & ride information; traffic information; and smart routing.

The deployment of C-ITS in Europe requires legal, architectural, administrative, governance, technical and standardisation issues to be overcome. The European platform C-Roads brings together European Union member states and road operators who wish to collaborate to deploy C-ITS services in a harmonised and interoperable manner throughout Europe.
“At the Spanish level, it is intended to make an effort to promote the participation of all entities in the sector, in addition to influencing the decisions to be made in Europe,” C-Roads Spain says on its website.
Harmonisation is key to C-Roads’ cooperation. “Consequently, all the participants share the vision of the main objectives,” the organization continues. “Which are, in addition to harmonisation, the implementation through pilots of the Day 1 and Day 1.5 services, the demonstrations of the implementation of C-ITS and the advance towards a large-scale implementation.”
(Source: C-Roads Spain)


")



")
")
")
